My Contributions

Research
Publications and participation to conferences and seminars
Libraries
Useful libraries and drivers for robotics
Teaching
Courses given at ENSTA Bretagne
Latest Papers
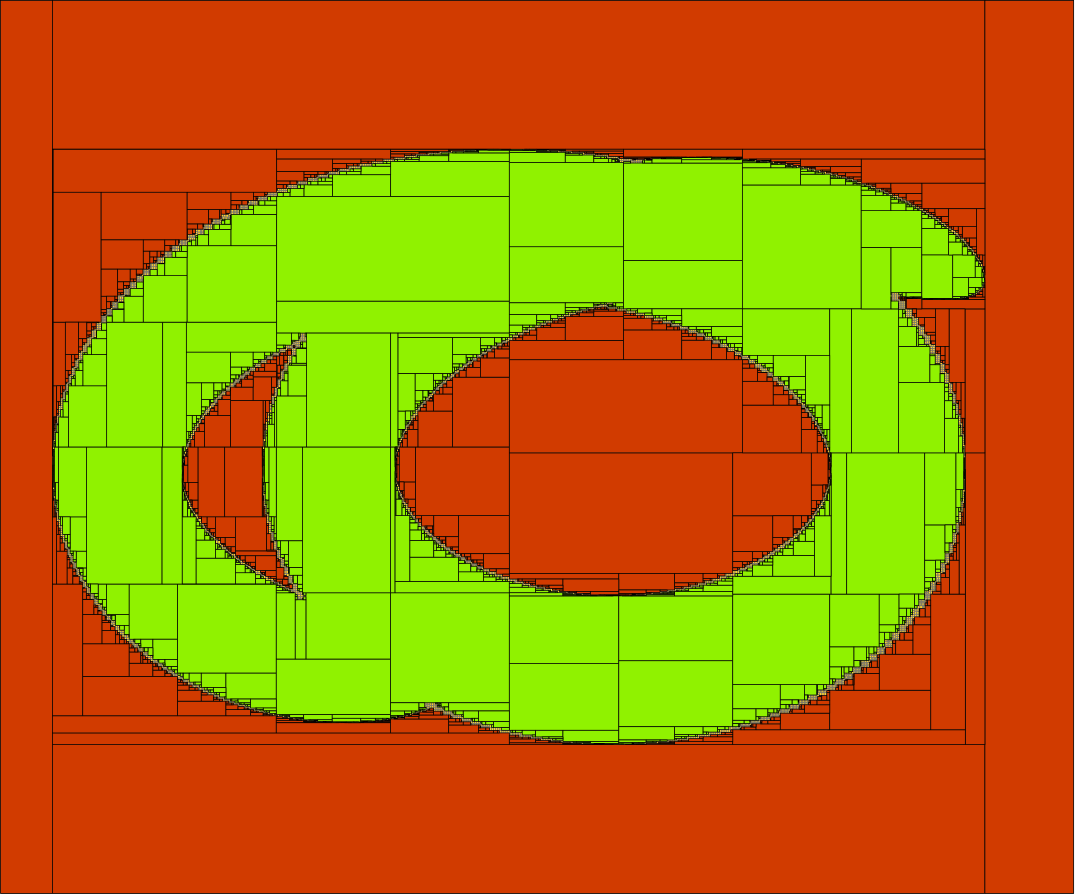
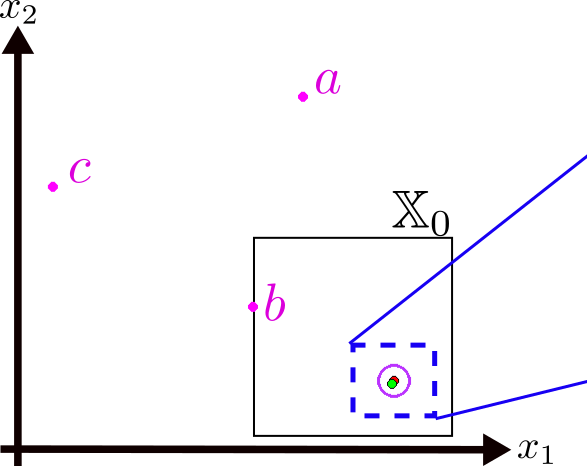
Boundary approach to characterize the inner and outer approximation of the image of a disk
Maël GODARD, Luc JAULIN, Damien MASSÉ
Inner and outer approximation of the image of a set by a nonlinear function
Maël GODARD, Luc JAULIN, Damien MASSÉ
Interval-based validation of a nonlinear estimator
Maël GODARD, Luc JAULIN, Damien MASSÉ
Conferences & Seminars
Upcoming
Past
JJCR 2025
29/09/2025 - Rennes
Guaranteed estimation of the area swept by a sonar
SCAN 2025
22/09/2025 to 26/09/2025 - Oldenbourg
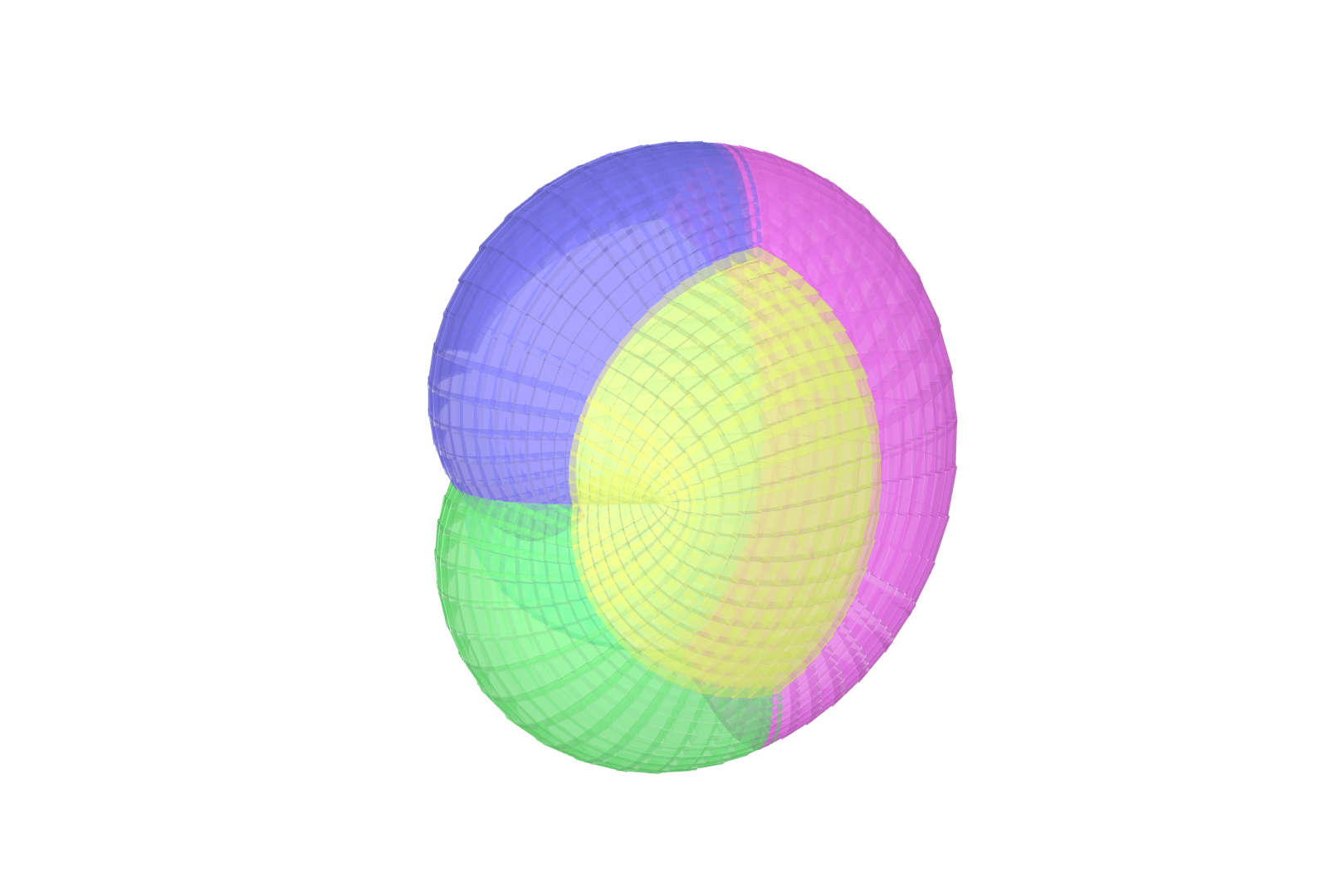
Adaptative parallelepipedic approximation of the image of a set by a nonlinear function
SWIM 2025
30/06/2025 to 02/07/2025 - Rennes
Inner and outer approximation of the workspace of a robotic arm